جيجو مالايل
ترجمة: شيماء ميران
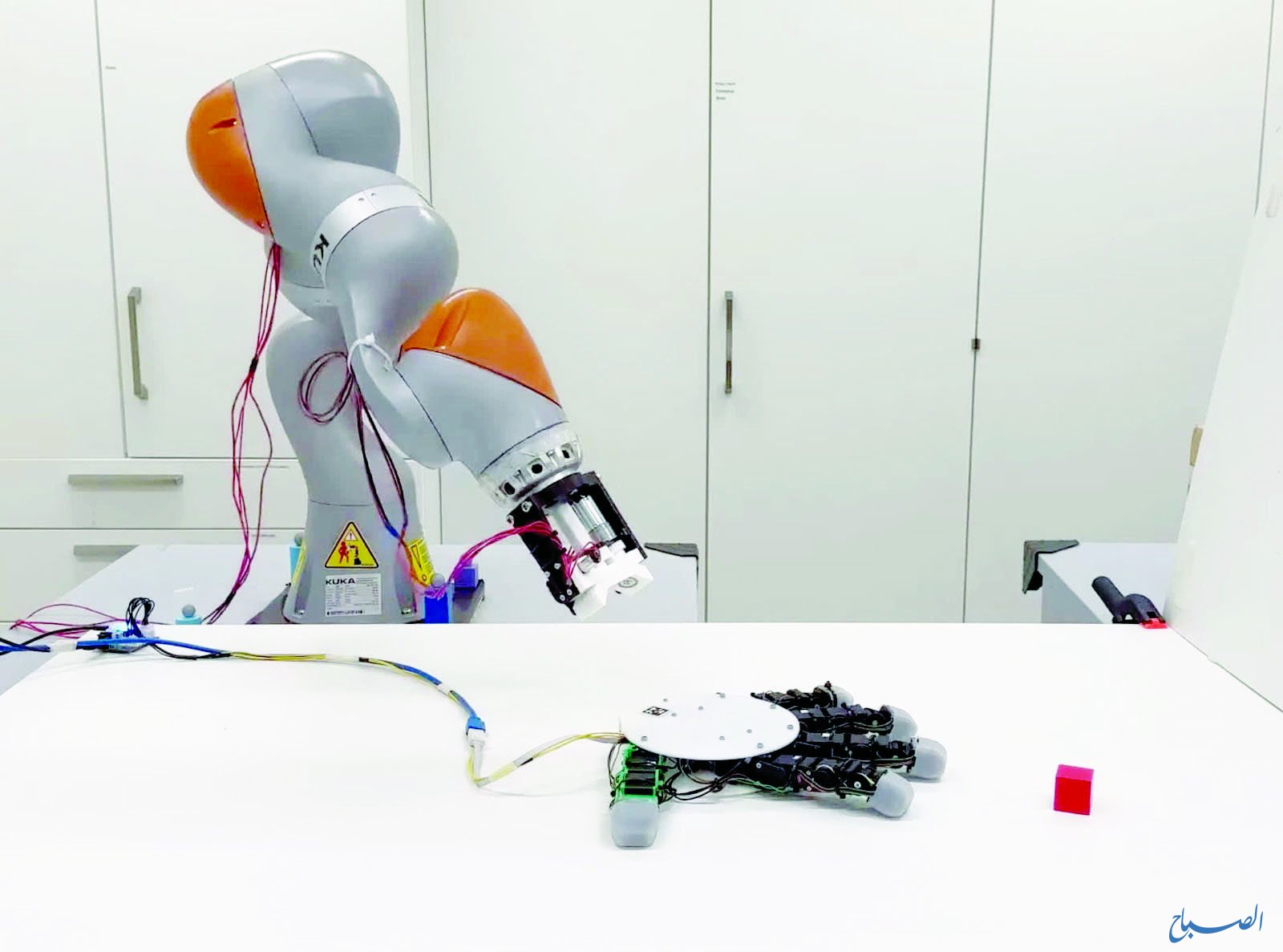
قام باحثون في المعهد الفيدرالي السويسري للتكنولوجيا في لوزان (EPFL) بتطوير يدٍ آليَّة تنفصل عن ذراعها وتزحف مثل العنكبوت لاستعادة الأشياء التي يصعب الوصول إليها. ويتضمن هذا التصميم يداً بخمسة أصابع، اثنان منها للإمساك بالأشياء، وثلاثة أصابع مطورة للزحف عند انفصالها عن الذراع.يمكن لهذه اليد الآليَّة، التي أطلق عليها اسم “Handcrawler”، أنْ تنفصلَ بسهولة عن ذراعها، وتزحفَ عبر الأسطح مثل العنكبوت، وتمسكَ بالأشياء، ثم تعود لتلتصق بذراعها مرة أخرى.
وإنْ كان الجسم بعيداً عن متناول الذراع، يمكن لليد أنْ تنفصلَ باستخدام مجموعة من المغانط وبراغي القفل، وتزحف لاستعادة الجسم ومن ثم تعود لربط نفسها بالذراع مرة أخرى للقيام بمهام إضافيَّة.
لقد عُرض هذا التصميم في المؤتمر الدولي الأربعين حول الروبوتات والأتمتة الذي أقامه معهد مهندسي الكهرباء والإلكترونيات في روتردام بهولندا.
متعددة الاستخدامات
من المعروف أنَّ أيدي الروبوتات والزاحفة منها تتشابه بقواسم أساسيَّة، مثل وجود جسمٍ رئيسٍ له أجزاء بارزة تؤدي مهامَّ مختلفة. لكنَّ معظم الأيدي الروبوتيَّة مصممة في الأساس للإمساك، والروبوتات الزاحفة تركز على الحركة.
لم يتم تصميم أي يدٍ روبوتيَّة حتى يومنا هذا متخصصة للتعامل مع الإمساك والزحف في آنٍ واحدٍ. ولكون الوظيفتين مهمتين على قدرٍ واحدٍ، فالاعتماد على تصميم يركز على الإمساك فقط قد لا يكون
مثالياً.
إنَّ تصميم يدٍ روبوتيَّة مخصصة للزحف والإمساك ليس بالأمر الهين، وليس أمراً متاحاً دائماً. فقد استخدم الباحثون لتطوير هذا الجهاز المبتكر خوارزميَّة وراثيَّة للتوصل الى التصميم الأمثل.
لقد جربت هذه الخوارزميَّة نماذج مختلفة، مع التركيز على عدد وموضع الأصابع في بيئة تحاكي البيئة الحقيقيَّة. ووفق مجلة»IEEE Spectrum” فإنَّ أفضل تصميمٍ كان ليد بخمسة أصابع، اثنان منها مخصصة للإمساك بالأشياء وتطوير الثلاثة الأخرى للزحف.
يوضح الباحثون أنَّ كل اصبع يتمتع بأربع درجات من الحريَّة، ما يسمح له بالانحناء في كلا الاتجاهين. ما يتيح لليد رفع الأشياء من دون ما يعيق حركتها شيء، ما يجعلها متعددة الاستخدامات للمهام التي تتطلب القدرة على الحركة والمهارة معاً.
يُبين الفريق أن هذا التصميم يسمح ليد الروبوت بأداء كلتا الوظيفتين على نحوٍ فعالٍ، ما يوفر حلاً أكثر تنوعاً يسد الفجوة بين قدرات الإمساك والزحف في الروبوتات.
يد الإمساك المستقلة
يتيح التصميم الفريد لـ» Handcrawler” بإنحناء الاصابع للأمام والخلف، ما يضاعف قدرته على الإمساك بالأشياء بطرقٍ مختلفة، ويعزز هذا التنوع من قدراته مقارنة بالأيدي الروبوتيَّة التقليديَّة.
يتمُّ تثبيت “Handcrawler” على معصم الروبوت باستخدام مغانط للتجميع وآليَّة لولبيَّة تقفلها بشكلٍ آمنٍ في مكانها. ورغم التحكم اليدوي في النظام، إلا أنَّ الباحثين يذكرون أنَّ نسخة مستقلة منه تعمل بالفعل في المختبر.
ويستخدم النظام المستقل تحديد المواقع الخارجيَّة، كما يمكنه تنفيذ تسلسل إمساك كامل دون أي تدخلٍ بشري.
يؤكد الفريق أنَّ هذا التصميم المبتكر يسمح للأنظمة الروبوتيَّة أنْ تصبح أكثر مرونة وقابليَّة للتكيف، ما يسمح للروبوت بالإمساك واسترجاع الأشياء التي لا يمكن عادةً الوصول
اليها.
لا تزال نتائج عمل الايدي الروبوتيَّة المستقلة المنفصلة التي تتحرك بشكلٍ مستقلٍ غير مؤكدة. وبينما أنها قد تعزز المرونة والكفاءة، إلا أنَّ هناك مخاوف تنشأ بخصوص السلامة والتحكم في البيئات المختلفة.
عن موقع انترستنغ اينجينيرنغ